

現今現代自動化系統的核心要素以多軸定位器技術為主要技術創新。從機器人到航空航太製造,世界各地的產業都在利用這項先進技術,以盡可能高的精度控制複雜的運動和操作。本文將探討多軸定位器如何利用其自動化功能來提高生產效率、創造新的設計可能性,並滿足日益增長的精密製造流程需求。我們誠摯邀請各界人士,包括工程師、技術愛好者和產業主管,共同探索多軸定位器系統將如何改變未來的自動化產業。
了解多軸定位器

多軸定位器的定義和用途
多軸定位器是一種精密的機械系統,使操作人員能夠控制物體和工具在三維空間中的運動。該系統廣泛應用於機器人、航空航天和製造業三大工業領域,因為其技術能夠提供精確的定位結果,這對於成功操作至關重要。該系統透過多個旋轉軸和線性軸的協同工作,使用戶能夠更有效地控制物體的運動和方向。該系統的主要功能是提高焊接、機械加工、檢測和組裝作業的精度和速度。現代應用中對高精度自動化系統的需求日益增長,使得多軸定位器成為在複雜的製造流程中實現快速生產和精確結果的必備設備。
多軸定位系統的類型
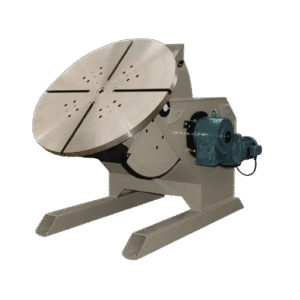
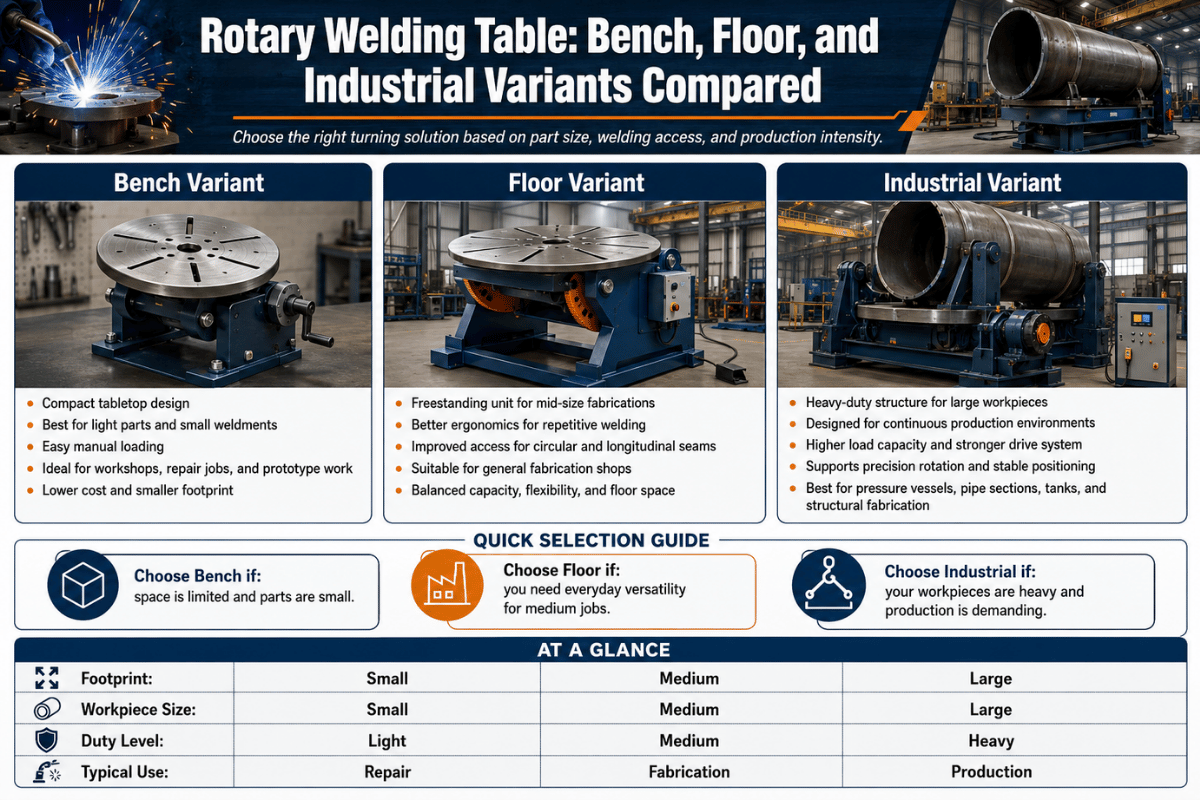
多軸定位系統的運作需要不同類型的系統,每種系統都必須滿足特定應用的需求。旋轉定位器是最常用的系統,它利用旋轉軸對工件進行定位,用於焊接、切割和機械加工等金屬加工製程。這些系統具有卓越的價值,因為它們能夠在高效加工複雜幾何形狀的同時,實現精確的定位結果。線性定位系統則是另一種選擇。 採用線性軸的類型 執行跨越多個方向路徑的直線路徑運動。
龍門架系統是一種先進的定位系統,它利用其線性運動框架在工廠中執行大量作業。龍門架系統因其能夠在保持剛性和精度的同時覆蓋廣闊的工作區域而備受青睞。關節式機械手臂作為多軸系統,結合了線性運動和旋轉運動能力,可執行包括物料搬運、包裝和精密3D列印操作在內的各種任務。這些系統利用多個關節來模擬人臂的移動,使其能夠在狹小空間內作業並完成複雜的動作。
六足定位器和史都華平台定位器因其六個自由度而成為熱門解決方案,能夠提供卓越的運動範圍和精確的控制。該系統採用六條腿,可透過調整位置實現沿三條直線路徑和三個旋轉路徑的運動。此系統設計尤其適用於光學對準、航空航太測試和外科器械開發等領域需要精確定位控制的應用。這些多軸定位系統透過其專用系統類型運行,可在多個工業領域提高運行速度、精度和輸出效率。
多軸定位器的關鍵組成部分
多軸定位系統依賴多個關鍵組件,這些組件協同工作以實現精確的運動控制。系統通常包含以下組件:
執行器-這些裝置透過三個不同的軸點執行運動操作。本系統主要採用線性執行器進行平移運動,旋轉馬達進行角位移運動。
編碼器-該系統使用編碼器來提供位置和速度資訊,使系統能夠透過即時調整實現更高的精度和重複性。
運動控制器-主控制器系統接收指令,同時控制所有軸的運動,以實現協調操作。
支撐結構-工程師使用高剛度材料製造輕型框架,以減少振動並在設備使用過程中保持運作穩定性。
軟體介面 – 此軟體工具使用戶能夠透過高階控制系統對定位器進行編程,這些控制系統包括路徑最佳化、誤差校正和遠端系統監控功能。
感測器-該系統利用整合感測器追蹤溫度、負載和外部作用力條件,從而提高精度,使系統能夠適應環境變化。
多軸定位器的各種組件使該系統能夠在多種工業和科學應用中提供卓越的精度、可靠性和靈活的性能。
自動化中的精度:多軸定位系統的作用

精度在工業應用中的重要性
現代工業應用對精度要求極高,因為精度決定了生產效率、產品品質和運作效率。半導體製造、航空航太和醫療器材生產等行業都需要高精度定位系統,以滿足其嚴格的公差要求並獲得可靠的運作結果。半導體產業的實踐表明,晶圓對準的微小誤差會導致微晶片性能失效,造成高昂的製造缺陷。航空航天作業依賴組件的精確組裝,以確保在極端運行條件下的安全性和性能。
隨著自動化技術的進步,未來對能夠跨多軸運行的亞微米級精度操作系統的需求將日益增長。這種高精度要求有助於系統減少浪費,同時獲得可重複的結果,從而在高生產率環境下維持穩定運作。多軸定位系統透過結合先進的運動控制演算法和即時回饋系統,實現了必要的工業精度。這些技術進步推動了創新,並提升了工業流程的品質標準。
多軸定位器如何實現高精度
多軸定位器的設計主要結合了先進的工程方法和現代技術解決方案,以實現其高精度標準。該系統採用耐用的機械結構,包括高剛度框架和低摩擦線性軸承,以保持運作穩定性並最大限度地減少振動。其先進的運動控制技術利用高解析度編碼器和伺服馬達提供精確的位置資訊和回饋數據,從而實現更高的精度。該系統採用即時監控和自適應控制演算法,能夠動態調整以應對環境變化、負載差異和機械部件的劣化。精密硬體組件和智慧控制系統的結合,使多軸定位器能夠達到現代工業所需的高精度和高重複性標準。
精密定位系統的應用
由於精密定位系統能夠提供極高的精度和操控性,因此許多產業都大量使用這類系統。半導體產業利用這些系統進行晶圓對準、光刻和檢測等工藝,從而生產出複雜的微晶片。這些系統也是先進醫療技術(包括機器人手術和診斷影像系統)的關鍵組成部分,因為精確定位直接影響患者的治療效果。此外,這些系統還能夠實現精確的目標定位、衛星組裝和光學系統對準等功能,從而為國防和航空航天應用提供支援。奈米技術領域的研究人員利用精密定位器來控制和研究原子和分子尺度的材料。精密定位系統的廣泛應用使其成為推動創新、提升現代設備和操作方法效率的關鍵技術。
並聯運動系統:運動控制的進展

並聯運動學技術概述
並聯運動系統(PKS)的開發是運動控制技術的重大突破,與傳統的串聯繫統相比,它具有更高的精度、速度和操作靈活性。該系統透過多個執行器協同工作來驅動一個平台,從而提高了剛度、減輕了重量並減少了機械故障。 PKS的特殊結構使其能夠在保持精確控制多個運動軸能力的同時,實現快速運動,因此非常適合機器人系統以及半導體生產和測量技術。
並聯運動學的最新發展透過引入高解析度感測器、即時控制演算法和小型致動系統,顯著提升了其運作能力。這些新的升級帶來了更優異的系統效能,從而提高了任務重複性和系統可靠性。並聯結構的對稱設計能夠自動減少誤差累積,進而提升測量精度。 PKS系統為運動控制系統引入的先進功能,為現代工業的運作創造了新的可能性。
並聯運動系統在自動化上的優勢
自動化系統受益於並聯運動系統 (PKS),因為這些系統具有卓越的精度和強大的結構完整性。該系統採用對稱式設計,連接多個執行器,從而在所有組件上實現均衡的重量分佈。 PKS 系統透過輕量化結構降低組件和系統的整體重量,從而實現更佳的性能。由於其輕量化設計能夠實現最佳性能,因此該技術在需要快速連續運動的環境中表現最佳。
另一項關鍵優勢在於這些系統更高的靈活性。 PKS系統支援多軸運動,使用戶能夠根據自身特定需求調整生產流程。其緊湊的設計也使其具有極高的空間利用率,這在空間寸土寸金的行業中至關重要。這些特性共同作用,在降低營運成本的同時,提高了生產效率和產品質量,使PKS系統成為現代自動化系統不可或缺的組成部分。
與傳統定位系統的比較
與傳統定位系統相比,PKS 系統在精確度、可靠性和靈活性方面均更勝一籌,能夠適應各種不同的環境。傳統系統的性能受限於其固定的機械部件,這些部件無法適應不斷變化的環境。 PKS 系統採用尖端技術,包括即時運動校正和高精度回饋迴路,從而實現卓越的空間精度和響應速度。傳統系統的設備在長時間使用後功能會下降,而 PKS 系統則能保持其運作效率,這得益於其採用的耐用材料和自動自校準系統,即使在嚴苛的運作條件下也能穩定運作。 PKS 系統將智慧感測器與人工智慧控制相結合,使其能夠處理傳統系統在不進行重大系統改造的情況下無法完成的複雜操作。該系統憑藉其獨特的設計,為那些需要在擴展業務的同時保持精確自動化流程的企業提供了理想的解決方案。
焊接定位器:提高焊接效率

焊接變位機在製造上的功能
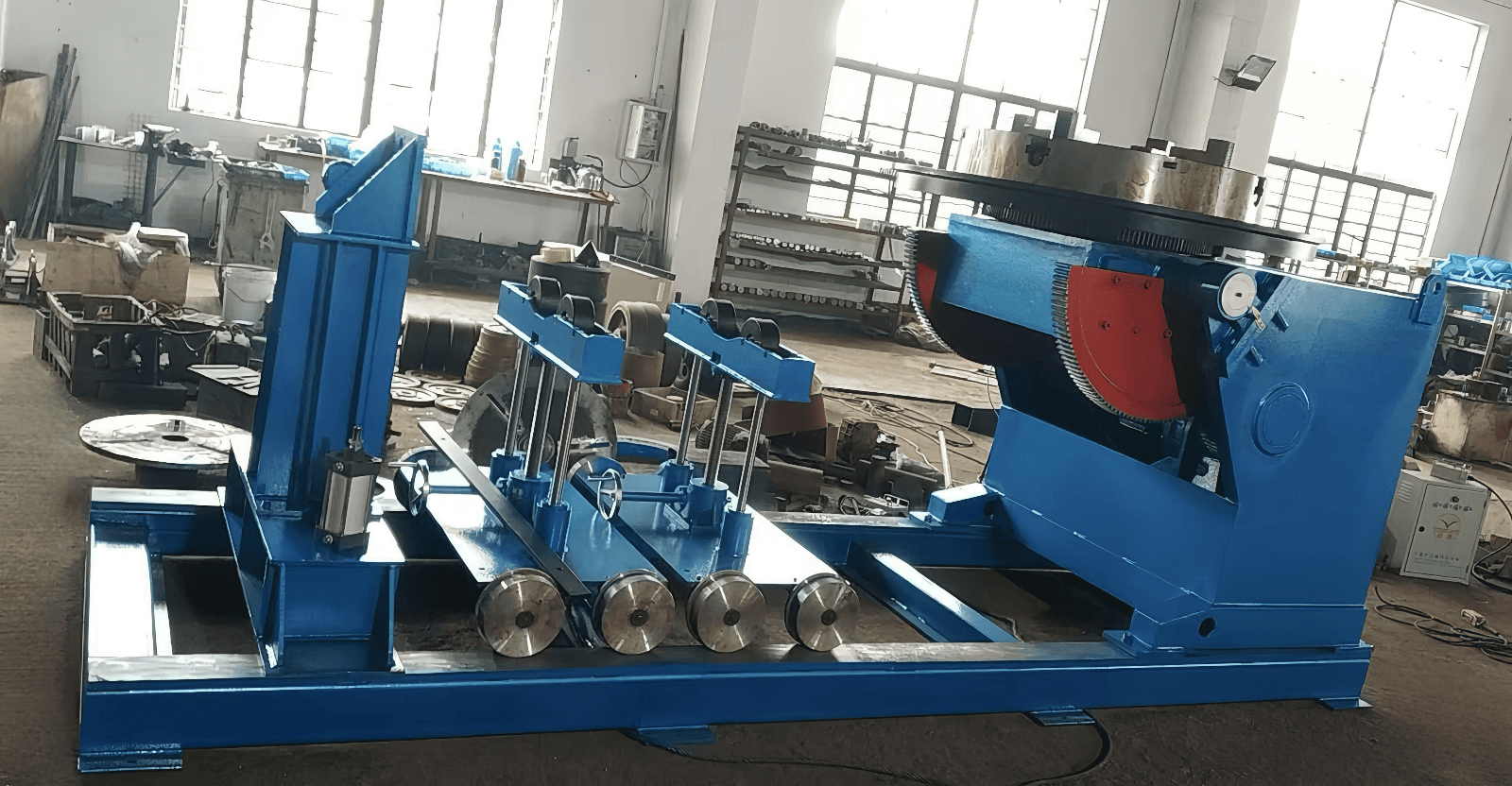
焊接變位機發揮著至關重要的作用,因為它能提高焊接作業的效率和精確度。這些設備可以固定工件,並使其旋轉,從而使焊工和機械手臂能夠以最佳角度進行焊接。該系統提供精確的對準和可控的運動,使焊接變位機能夠減少缺陷,同時確保焊接品質的一致性。該系統使工人能夠處理複雜、沉重的工件和不規則形狀的物體,因為它減輕了他們的體力消耗,同時提高了工作效率。現代變位機憑藉其先進的功能,例如變速控制、自動旋轉和與機器人焊接系統的兼容性,提供許多關鍵功能,從而在多個工業領域保持一致的製造標準。
多軸定位器在焊接過程中的集成
焊接工藝如今採用多軸定位器,顯著提高了操作效率和焊接精度。先進的工具使製造商能夠將工件定位到最佳焊接角度,從而減少生產過程中頻繁的重新定位需求。定位器為焊工提供穩定的工作角度,減少了因焊接位置難以觸及而產生的焊接缺陷,同時提高了操作人員的舒適度。
現代多軸定位器採用可程式控制和同步運動功能,可與機器人焊接系統實現平穩運作。這種技術組合能夠為複雜和大批量生產作業提供穩定、精確的焊接解決方案。多軸定位器憑藉其自動定位功能,可實現兩大優勢:縮短作業週期,提高生產效率,從而滿足汽車、航空航太和重型機械產業對安全性和效率的需求。其技術靈活性以及焊接技術的進步,充分展現了它們在建構未來製造業的重要性。
焊接定位系統案例研究
我的研究表明,焊接定位系統至關重要,因為它們能夠在多個行業中提高生產效率並維持品質標準。一項針對大型汽車製造商的案例研究展示了其組裝流程如何透過在其生產線上部署多軸定位器而得到改進。該公司利用這些系統在提高焊接品質的同時縮短了生產時間。該公司利用其定位系統以最小的設備變更即可生產不同的車型,從而減少了生產中斷。該專案的成功表明,先進的定位系統應該得到廣泛應用,因為它們為企業提供了在競爭激烈的市場中取得成功的關鍵工具。
航空航太業提供了另一個強有力的例證,因為其運作需要精確的結果才能正常進行。一家頂尖的航空航太公司使用自動化焊接定位系統來製造飛機零件。這些系統提高了尺寸精度,同時在複雜的幾何圖案中保持了焊接生產的一致性。自動化流程減少了對工人的需求,因為它使系統能夠更快地完成任務,從而降低了人力成本。這些證據表明,焊接定位系統在提高營運效率的同時,也滿足了對安全要求的嚴格規定。 製造業 必須滿足。
這些真實案例突顯了焊接定位系統的實際應用,它們為現代製造業營運帶來了變革性的影響。企業採用先進技術能夠提高營運效率和產品質量,從而更好地適應市場需求,這使得這些技術對於企業在競爭激烈的行業中運作至關重要。
多軸定位器技術的未來發展趨勢

定位系統中的新興技術
新興技術推動了多軸定位系統的發展,其創新能力樹立了新的產業標準。人工智慧 (AI) 和機器學習演算法的融合是一項重大的技術進步。這些技術使定位系統能夠創建最佳運動模式,滿足預測性維護需求,並透過即時適應性來應對複雜的製造操作。該系統利用包括雷射追蹤器和光學編碼器在內的先進感測器,提供精確的位置和對準數據,從而顯著提高精度和準確度。
物聯網 (IoT) 連結技術的應用已成為人們研究的重要趨勢。物聯網定位系統能夠與製造生態系統中的所有智慧設備完全相容,使各系統協同工作並實現自動化流程。碳纖維複合材料作為一種輕質高強度材料,其發展使得製造更有效率節能的定位系統成為可能。這些新技術透過提高靈活性和加快運行速度,改進了多軸定位器,使工業領域能夠滿足未來製造需求。
人工智慧和自動化對定位的影響
人工智慧 (AI) 和自動化技術為定位系統的各個方面帶來了更高水準的精度和更靈活的解決方案。如今,定位系統利用 AI 演算法,透過運動控制、設備壽命預測和即時決策支援來提高營運效率。系統的預測能力確保設備正常運作,同時提升整體工作效率。自動化流程提高了營運效率,因為它減少了人工操作,同時也能產生穩定且高品質的結果。這些技術的結合創造了智慧系統,顯著提升了系統的效能,這對於需要在快速工業變革時期改善生產流程的產業至關重要。
未來十年多軸定位器的發展預測
未來十年,人工智慧、機器學習和即時數據分析技術的進步將為多軸定位器帶來至關重要的技術革新。這些技術將使定位器達到前所未有的精度、適應性和可靠性水平,這對於航空航太、醫療器材製造和先進機器人應用至關重要。物聯網的整合將建立系統間的全面互聯,使系統能夠透過自動自診斷來預防可能中斷其功能的潛在問題。隨著材料科學的不斷發展,下一代定位器將受益於強度更高、重量更輕的材料,從而提高其運行安全性並降低能耗。智慧製造的日益普及將使多軸定位器成為實現超自動化並推動全球技術進步的關鍵工具。
常見問題(FAQ)
選擇不同的運動軸會對多軸定位器的性能產生什麼影響?
軸選擇程序決定了系統在滿足所需精度對準標準的同時執行工件搬運任務的能力。軸的數量影響自由度,從而決定需要單軸平台、旋轉平台還是像六足機器人這樣的全多軸系統。軸的選擇決定了行程距離、系統的剛度特性和慣性特性,這些因素共同影響系統重複運動和高速運轉的能力。設計人員需要找到有效載荷能力、扭矩要求和軸承選擇的最佳組合,因為這些因素決定了執行器和馬達能否按計劃執行任務,而不會造成不必要的設備停機時間。該系統透過運動控制器和 EtherCAT 介面集成,實現了線性平台、旋轉部件和並聯運動系統之間的同步運動。
六足機器人和史都華平台設計有哪些優勢?
六足機器人和史都華平台設計提供六個自由度,支援滿足計量光子學和航空航天應用需求的精確定位系統。六足機器人系統透過其並聯運動學系統實現更佳的動態性能,從而實現微定位和高性能運動。六足機器人設計具有模組化和可擴展性,使生產線和自動化生產線能夠高效運行,同時佔用更少的佔地面積並簡化夾具設計。六足機器人和斯圖爾特平台的重複性和靈活的介面能力使其成為光學對準、晶圓處理和精密對準應用的理想選擇。這些系統透過結合無刷或壓電致動器實現卓越的性能,使其能夠以最小的慣性實現高速定位,並獲得極佳的投資回報。
運動控制器如何與多軸系統整合?
該系統採用運動控制器來管理三種類型的電機,包括伺服電機、步進電機和線性電機,以及用於執行複雜多軸軌蹟的執行器。這些執行器透過其可程式控制功能實現高重複性。目前的控制器支援 EtherCAT,能夠提供高速回饋,並執行機器人操作、焊接定位器任務和計量程式所需的高階運動曲線。運動控制器調諧的成功取決於在所有軸上實現扭矩、阻尼和剛度設定的正確平衡,從而確保旋轉平台和線性平台在運行過程中不會產生振盪。該系統提供的控制器具有自動化接口,可支援其整合到生產系統中。同時,系統也利用診斷和模組化更新來最大限度地減少生產中斷。控制器選擇過程在確定投資報酬率 (ROI) 方面起著至關重要的作用,因為它能夠提高生產效率,並有助於建立可擴展以滿足未來需求的系統。
在精密任務中,壓電驅動與傳統伺服馬達相比有何優勢?
壓電致動器在微定位和高頻應用中表現最佳,因為其極高的分辨率、極低的延遲和極小的反沖優於傳統的伺服馬達和無刷馬達系統。該系統適用於需要亞微米或奈米級重複精度的光學對準、光子學和精密計量應用。伺服馬達和線性馬達具有更優的行程範圍和有效載荷能力,使其成為焊接定位器、重型夾具和生產線的理想選擇,這些應用依賴於高效的扭矩和慣性控制。一些系統將壓電平台與粗調伺服平台結合,以實現大行程和超精細調節,從而提高系統的整體投資回報率。工程師必須評估控制器相容性、系統剛度、特殊介面需求以及運動控制器需求,才能充分發揮壓電系統的潛力。
在決定使用多軸定位系統之前,我應該評估投資回報的哪些面向?
計算多軸系統的投資報酬率需要企業評估其生產效率的提升、停機時間的減少以及實現精準性能的能力。 焊接定位 以及計量和航空航天裝配作業。包含六軸平台和模組化線性平台的多軸系統設計,能夠將多個單軸系統整合到一個緊湊的系統中,幫助企業縮短生產週期。分析需要評估初始成本(包括馬達、運動控制器和軸承)以及系統與自動化生產線的整合成本,並考慮後續因降低人力成本和提高營運效率而帶來的經濟效益。由於模組化介面和可程式控制器兼具可擴展性和適應性,即使未來製程發生變化,這項投資也能保持穩健。總擁有成本必須考慮維護費用、夾具相容性以及精確對準和降低變異性所帶來的潛在品質提升。
參考資料
利用建模和測量方法提高多軸工具機的定位精度
oulurepo.oulu.fi
探討提高多軸工具機定位精度的方法。
比較工具機多軸運動定位方法
journals.sagepub.com
分析多軸機床的不同運動定位方法。
基於視覺的動態目標追蹤及其在多軸位置控制中的應用
鏈接.springer.com
研究基於視覺的動態多軸位置控制技術。





{kind=link}
{kind=link}
{kind=link}
{kind=link}