

現代の自動化システムの中核を成す要素は、多軸ポジショナー技術を主要な技術革新として活用しています。ロボット工学から航空宇宙製造まで、世界中の産業がこの先進技術を用いて、複雑な動作や操作を最大限の精度で制御しています。本ブログ記事では、多軸ポジショナーがその自動化機能をどのように活用して生産効率を高め、新たな設計の可能性を生み出し、高まる精密製造プロセスへのニーズを満たしているのかを探ります。エンジニア、技術愛好家、業界幹部など、あらゆる分野の方々が、多軸ポジショナーシステムが将来の自動化業界をどのように変革していくのかを知るために、ぜひご参加ください。
多軸ポジショナーの理解

多軸ポジショナーの定義と目的
多軸ポジショナーは、オペレーターが物体や工具を三次元空間で制御できるようにする高度な機械システムとして機能します。このシステムは、ロボット工学、航空宇宙、製造業の3つの産業分野で活用されています。これは、その技術が、作業の成功に不可欠な正確な位置決め結果をもたらすためです。このシステムは、複数の回転軸と直線軸を実装することで動作し、ユーザーは自身の動きと物理的な向きをより詳細に制御できます。このシステムの主な機能は、溶接作業、機械加工、検査プロセス、組立作業の精度と速度の両方を向上させることです。現代のアプリケーションにおける高精度自動化システムの需要の高まりにより、多軸ポジショナーは、複雑な製造ワークフローにおいて迅速な生産と正確な結果を実現するための不可欠な機器となっています。
多軸位置決めシステムのタイプ
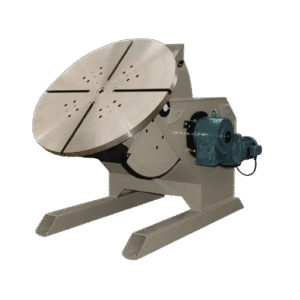
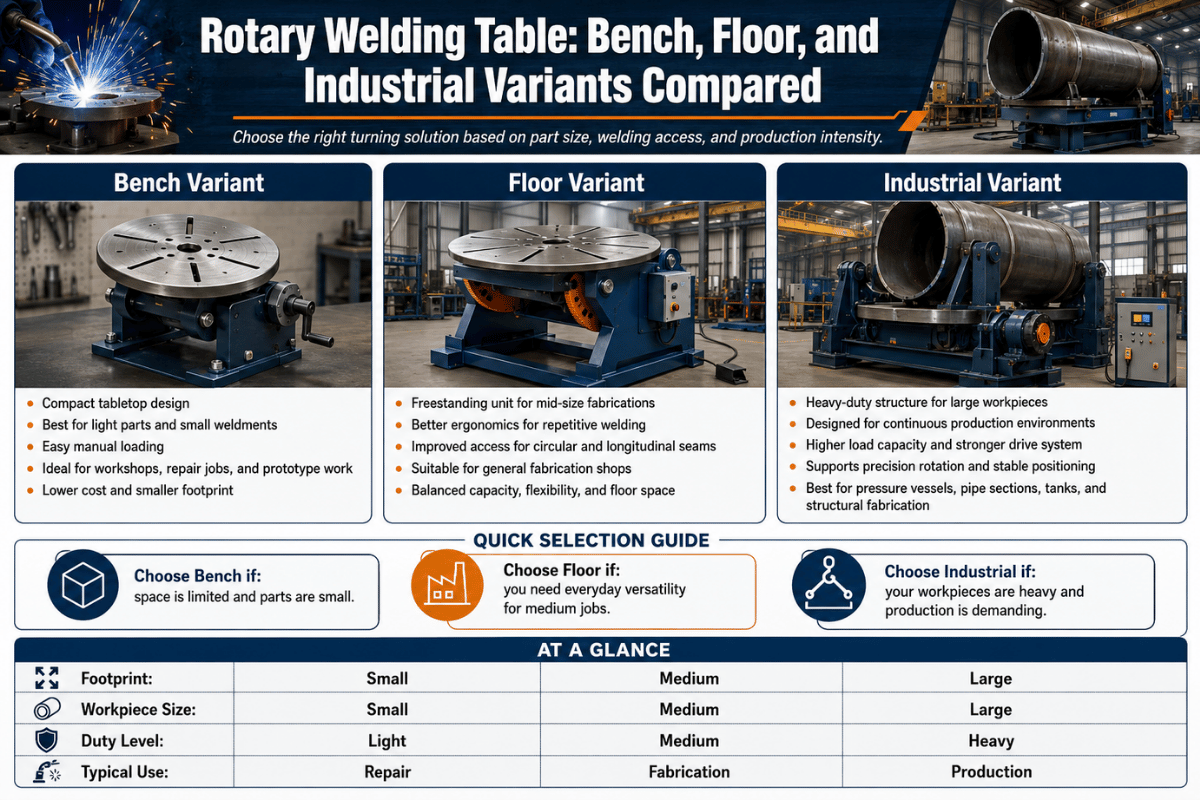
多軸位置決めシステムの運用には、それぞれの用途の特定のニーズを満たす必要がある様々なシステムタイプが求められます。回転式位置決め装置は、溶接、切断、機械加工などの金属加工プロセスにおいてワークピースを位置決めするために回転軸を利用する、最も頻繁に使用されるシステムです。これらのシステムは、複雑な形状を効率的に処理しながら高精度な結果を実現できるため、非常に高い価値を発揮します。直線位置決めシステムは、別のタイプのシステムです。 直線軸を用いるタイプ 複数の方向の経路を横断して、直線経路の移動を実行する。
ガントリーシステムは、直線運動フレームワークを利用して工場内で大規模な作業を行う高度な位置決めシステムとして機能します。ガントリーシステムは、剛性と精度を維持しながら広大な作業エリアをカバーできるため、しばしば選ばれます。多関節ロボットアームは、直線運動と回転運動の機能を組み合わせた多軸システムとして機能し、マテリアルハンドリングやパッケージング、繊細な3Dプリント作業など、さまざまなタスクを実行します。これらのシステムは、複数の関節を使用して人間の腕の動きを再現し、狭い場所での作業や複雑な動作を可能にします。
ヘキサポッドポジショナーとスチュワートプラットフォームポジショナーは、6自由度による優れた動作範囲と精密な制御により、人気の高いソリューションとなっています。このシステムは、6本の脚が位置を調整することで、3つの直線経路と3つの回転運動を実現します。このシステム設計は、光学アライメント、航空宇宙試験、外科手術器具開発など、精密な位置決め制御が求められる用途に最適です。多軸ポジショニングシステムは、専用のシステムタイプによって動作し、複数の産業分野において、高精度な性能と高い生産性、そして高速な動作を実現します。
多軸ポジショナーの主要構成要素
多軸ポジショナーシステムは、正確なモーション制御を実現するために連携して動作するいくつかの重要なコンポーネントに依存しています。このシステムは通常、以下のコンポーネントで構成されています。
アクチュエータ – これらの装置は、3つの異なる軸点を介して動作を実行します。本システムは、主な動作方法として、直線運動にはリニアアクチュエータを、角度変位にはロータリーモータを使用します。
エンコーダー – このシステムは、位置情報と速度情報を提供するためにエンコーダーを使用しており、リアルタイム調整によってシステムの精度と再現性を向上させています。
モーションコントローラ – メインコントローラシステムはコマンドを受信しながら、すべての軸の動きを制御して協調動作を実現します。
支持構造 – エンジニアは高剛性材料を使用して軽量フレームを構築し、振動を低減し、機器使用中の動作安定性を維持します。
ソフトウェアインターフェース – ソフトウェアツールを使用すると、経路最適化、エラー訂正、リモートシステム監視機能などの高度な制御システムを介して、ポジショナーをプログラムできます。
センサー – このシステムは、温度、負荷、外部力などの状況を追跡することで精度を向上させる統合センサーを使用しており、これによりシステムが環境の変化に適応できるようになります。
多軸ポジショナーの様々な構成要素により、このシステムは、多様な産業および科学用途において、卓越した精度と信頼性、そして柔軟な性能を提供することができます。
自動化における精度:多軸位置決めシステムの役割

産業用途における精度の重要性
現代の産業用途では、生産性、製品品質、および運用効率を左右する精度が不可欠です。半導体製造業界、航空宇宙産業、医療機器製造分野はいずれも、厳しい公差要件を満たし、信頼性の高い運用結果を得るために、高精度な位置決めシステムを必要としています。半導体業界では、ウェーハの位置合わせにおけるわずかな誤差がマイクロチップの性能低下につながり、高額な製造不良を引き起こすことが示されています。航空宇宙産業では、過酷な運用条件下での安全性と性能を保証するために、部品の正確な組み立てが不可欠です。
自動化技術の発展に伴い、複数の軸で動作するサブマイクロメートル精度の操作システムに対するニーズは今後ますます高まるでしょう。このシステムには、高い生産速度を維持するために必要な再現性の高い結果を得ながら、無駄を削減できるという点で、このレベルの精度が求められます。多軸位置決めシステムは、高度なモーション制御アルゴリズムとリアルタイムフィードバックシステムを組み合わせることで、必要な産業精度を実現します。これらの技術革新によって、産業プロセスは新たな品質基準を達成し、イノベーションを推進します。
多軸ポジショナーが高精度を実現する仕組み
多軸ポジショナーの設計は、高度なエンジニアリング手法と最新の技術ソリューションという2つの主要な要素を用いて、高い精度基準を実現しています。これらのシステムは、高剛性フレームと低摩擦リニアベアリングからなる耐久性の高い機械構造を採用し、振動を最小限に抑えながら動作安定性を維持しています。高分解能エンコーダとサーボモーターを用いた高度なモーションコントロール技術により、高精度な位置情報とフィードバックデータを提供し、高い精度を実現しています。また、リアルタイムモニタリングと適応制御アルゴリズムを組み合わせることで、環境変化や負荷差、機械部品の劣化に対応する動的な調整を可能にしています。高精度なハードウェアコンポーネントとインテリジェントな制御システムの組み合わせにより、多軸ポジショナーは現代産業が求める高い精度と再現性を実現しています。
精密測位システムの応用
高精度位置決めシステムは、極めて高い精度と操作制御能力を提供するため、多くの産業で広く利用されています。半導体業界では、複雑なマイクロチップを製造するウェハーアライメント、リソグラフィ、検査プロセスにこれらのシステムが使用されています。また、正確な位置決めが患者の治療結果に直接影響するため、ロボット手術や画像診断システムなどの高度な医療技術においても、これらのシステムは不可欠な構成要素となっています。さらに、精密なターゲティング、衛星組立、光学システムアライメント機能を実現できるため、防衛・航空宇宙分野でも活用されています。ナノテクノロジーの研究者は、原子・分子レベルの物質を制御・研究するために、高精度位置決め装置を使用しています。これらのシステムは幅広い用途で活用されており、現代の機器や運用方法の効率性を向上させながら、イノベーションを推進する不可欠な技術として位置づけられています。
並列運動システム:モーションコントロールの進歩

パラレルキネマティクス技術の概要
並列運動システム(PKS)の開発は、モーションコントロール技術における大きなブレークスルーをもたらし、従来の直列システムよりも優れた精度、速度、そして操作の柔軟性を実現します。このシステムは、複数のアクチュエータが連携して1つのプラットフォームを動かすことで動作し、剛性の向上、軽量化、そして機械的故障の低減を実現します。PKSの特殊な構造により、複数の運動軸を精密に制御しながら高速な動作が可能となり、ロボットシステムや半導体製造・計測技術への応用に適しています。
並列キネマティクスの最新技術開発により、高解像度センサー、リアルタイム制御アルゴリズム、小型アクチュエータシステムの導入によって、その動作性能が向上しました。これらの最新技術は、システムのパフォーマンス向上、タスクの再現性の向上、そしてシステムの信頼性の完全な確保を実現します。並列構成の対称設計は、誤差の蓄積を自動的に低減し、測定精度の向上につながります。PKSシステムがモーションコントロールシステムにもたらす高度な機能は、現代産業が業務に活用できる新たな可能性を切り開きます。
自動化における並列運動システムの利点
自動化システムは、パラレルキネマティックシステム(PKS)の優れた精度と強固な構造的完全性によって大きなメリットを得られます。このシステムは、複数のアクチュエータを接続する対称的なパターンを採用することで、すべてのコンポーネントにバランスの取れた重量配分を実現しています。PKSシステムは軽量構造により、コンポーネントの重量とシステム全体の重量を軽減し、より優れた性能を発揮します。軽量設計によって最高のパフォーマンスを実現できるため、高速かつ連続的な動作が求められる環境において特に威力を発揮します。
もう一つの重要な利点は、これらのシステムの柔軟性の向上です。PKSシステムは多軸動作を可能にするため、ユーザーはそれぞれのニーズに合わせて生産プロセスを柔軟に調整できます。また、コンパクトな設計により省スペース性にも優れており、床面積が限られている業界では特に重要です。これらの特長が相まって、運用コストを削減しながら生産効率と製品品質を向上させるため、PKSシステムは現代の自動化システムに不可欠な構成要素となっています。
従来の測位システムとの比較
PKSシステムは、従来の測位システムに比べて、精度、信頼性、そしてさまざまな環境での柔軟性に優れています。従来のシステムは、変化する状況に対応できない固定された機械部品に依存しているため、性能が制限されます。PKSシステムは、リアルタイムで動作するモーション補正や高精度フィードバックループなどの最先端技術を採用し、優れた空間精度と応答性を実現しています。従来のシステムでは、長期間の使用後に機器の機能が低下するという問題がありますが、PKSシステムは耐久性のある素材と、厳しい運用期間中も良好に機能する自動自己校正システムを採用しているため、運用効率を維持します。PKSシステムは、スマートセンサーとAIによる制御を組み合わせることで、従来のシステムでは大規模なシステム変更なしには実行できない複雑な操作にも対応できます。このシステムは、精密な自動化プロセスを維持しながら事業を拡大する必要のある企業にとって、理想的なソリューションを提供します。
溶接ポジショナー:溶接効率の向上

製造業における溶接ポジショナーの機能
溶接ポジショナーは、製造現場における溶接作業の効率向上と精度向上に貢献するため、不可欠な役割を果たします。この装置はワークピースを固定しながら回転させることで、溶接工やロボットアームが最適な角度で溶接できるようにします。適切な位置合わせと制御された動作により、溶接ポジショナーは欠陥を減らし、一貫した溶接品質を実現します。また、作業者の身体的負担を軽減し、作業効率を高めることで、複雑で重いものや不規則な形状の物体も扱いやすくなります。最新のポジショナーは、可変速度制御、自動回転、ロボット溶接システムとの互換性といった高度な機能を備え、複数の産業分野で一貫した製造基準を維持するための不可欠な機能を提供します。
溶接プロセスにおける多軸ポジショナーの統合
溶接工程では現在、多軸ポジショナーが活用されており、作業効率と溶接精度が大幅に向上しています。高度なツールにより、製造業者はワークピースを最適な溶接角度に配置できるため、生産作業中の再配置作業が大幅に削減されます。ポジショナーは溶接作業者に安定した作業角度を提供し、手の届きにくい溶接位置から発生する溶接欠陥を低減するとともに、作業者の快適性を向上させます。
最新の多軸ポジショナーは、プログラマブル制御と同期動作機能を活用し、ロボット溶接システムとのスムーズな連携を実現します。この技術の組み合わせにより、複雑な製造工程から大量生産まで、あらゆる工程において一貫性のある高精度な溶接が可能になります。多軸ポジショナーは、自動位置決め機能によって2つのメリットをもたらします。それは、作業サイクルタイムの短縮と生産性の向上であり、自動車、航空宇宙、重機械産業における安全性と効率性のニーズを満たします。溶接技術の進歩と相まって、その技術的な柔軟性は、製造業の未来を築く上でいかに重要な役割を果たすかを示しています。
溶接位置決めシステムに関する事例研究
私の研究によると、溶接位置決めシステムは、複数の分野にわたって品質基準を維持しながら生産性を向上させるため、不可欠な役割を果たします。ある大手自動車メーカーの事例研究では、生産ラインに多軸位置決め装置を導入することで、組立工程がどのように改善されたかを示しています。同社はこれらのシステムを活用することで、溶接品質を向上させながら生産時間を短縮しました。また、位置決めシステムを用いて、最小限の設備変更で様々な車種を生産できるようになり、生産停止時間の削減にもつながりました。このプロジェクトの成功は、高度な位置決めシステムが、競争の激しい市場で成功するために不可欠なツールを企業に提供するものであることを示しています。
航空宇宙産業は、その業務が適切に機能するために正確な結果を必要とするため、もう一つの強力な証拠となります。ある大手航空宇宙企業は、航空機部品の製造に自動溶接位置決めシステムを使用しました。このシステムは、複雑な幾何学的パターン全体にわたって溶接生産の均一性を維持しながら、寸法精度を向上させました。自動化プロセスにより、システムがタスクをより迅速に完了し、人件費を削減できるため、作業員の必要性が減少しました。この証拠は、溶接位置決めシステムが安全性に敏感な厳しい要件を満たしながら、運用効率を向上させることを示しています。 製造業 満たさなければなりません。
これらの実例は、溶接位置決めシステムの実際的な応用例を示しており、現代の製造業務に革新的な効果をもたらします。企業による先進技術の導入は、業務効率の向上と製品品質の向上につながり、市場ニーズへのより的確な対応を可能にします。そのため、これらの技術は競争の激しい業界における企業の事業運営に不可欠なものとなっています。
多軸ポジショナー技術の将来動向

測位システムにおける新興技術
新興技術は、革新的な機能によって新たな産業標準を生み出す多軸位置決めシステムの開発を推進しています。人工知能(AI)と機械学習アルゴリズムの統合は、大きな技術的進歩です。これらの技術により、位置決めシステムは最適な動作パターンを作成でき、予測保守の要件を満たし、リアルタイムの適応性によって複雑な製造作業を処理できます。このシステムは、レーザートラッカーや光学エンコーダなどの高度なセンサーによって高精度な位置とアライメントデータを取得し、精度と正確性を向上させています。
IoT(モノのインターネット)接続の導入は、現在研究が盛んに行われている重要なトレンドとなっています。IoT対応の位置決めシステムは、製造エコシステムに存在するすべてのスマートデバイスとの完全な互換性を確立し、システム間の連携と自動化プロセスの実現を可能にします。軽量でありながら強度に優れた炭素繊維複合材料の開発により、より効率的で省エネルギーな位置決めシステムの構築が可能になりました。これらの新たな開発により、多軸位置決め装置の柔軟性と動作速度が向上し、産業界は今後の製造ニーズに対応できるようになります。
AIと自動化がポジショニングに与える影響
人工知能(AI)と自動化技術は、測位システムのあらゆる側面において、新たなレベルの精度と柔軟なソリューションをもたらします。測位システムは現在、AIアルゴリズムを用いて、動作制御、機器寿命予測、そして即時的な意思決定支援を通じて、運用効率を向上させています。システムの予測能力により、機器の稼働を維持しながら、作業全体の効率を高めることができます。自動化プロセスは、手作業を減らしつつ、高品質を維持する安定した結果を生み出すため、運用効率を向上させます。これらの技術の組み合わせにより、性能を向上させるインテリジェントなシステムが構築され、急速な産業変化の時代に生産プロセスを改善する必要のある業界にとって不可欠なものとなります。
今後10年間における多軸ポジショナーの予測
今後10年間で、人工知能、機械学習、リアルタイムデータ分析の発展により、多軸ポジショナーは重要な技術的進歩を遂げるでしょう。これらの技術により、ポジショナーはかつてないレベルの精度、適応性、信頼性を実現できるようになり、航空宇宙、医療機器製造、高度なロボットアプリケーションにとって不可欠なものとなります。IoTの統合により、システム間の完全な接続性が確立され、機能障害を引き起こす可能性のある問題を自動的に自己診断することで、システムが運用できるようになります。次世代ポジショナーは、材料科学の継続的な発展により、より強く軽量な材料の恩恵を受け、運用上の安全性とエネルギー消費が改善されます。スマートマニュファクチャリングの普及が進むにつれ、多軸ポジショナーはハイパーオートメーションを実現する不可欠なツールとして位置づけられ、世界的な技術進歩を支える存在となるでしょう。
よくある質問(FAQ)
異なる移動軸を選択することは、多軸ポジショナーの性能にどのような影響を与えるか?
軸の選択手順は、必要な精度アライメント基準を維持しながら、ワークピースハンドリングタスクを実行するシステムの能力を確立します。軸の数は自由度に影響し、したがって、単軸ステージ、回転ステージ、またはヘキサポッドのような完全な多軸システムが必要かどうかに影響します。軸の選択は、移動距離、システムの剛性特性、および慣性特性を決定し、これらがシステムの繰り返し動作能力と高速動作能力に影響します。設計者は、ペイロード容量とトルク要件、およびベアリングの選択の適切な組み合わせを見つける必要があります。これらの要素によって、アクチュエータとモータが不要な機器のダウンタイムを発生させることなく、予定されたタスクを実行できるかどうかが決まるからです。このシステムは、モーションコントローラとEtherCATインターフェースの統合により、リニアステージと回転コンポーネント、およびパラレルキネマティックシステム間の同期動作を実現します。
六脚歩行型およびスチュワート型プラットフォーム設計には、どのような利点がありますか?
ヘキサポッドとスチュワートプラットフォームの設計は、6自由度を実現し、計測、フォトニクス、航空宇宙用途の要件を満たす高精度位置決めシステムをサポートします。ヘキサポッドシステムは、並列キネマティックシステムにより、マイクロポジショニングと高性能モーション機能を実現し、優れた動的性能を発揮します。ヘキサポッドの設計は、モジュール式で拡張性に優れているため、生産ラインや自動化ラインを効率的に運用でき、設置面積の削減と治具設計の簡素化を実現します。ヘキサポッドとスチュワートプラットフォームの再現性と柔軟なインターフェース機能は、光学アライメント、ウェーハハンドリング、精密アライメント用途に最適です。これらのシステムは、ブラシレスアクチュエータまたは圧電アクチュエータの組み合わせにより、優れた投資対効果で最小限の慣性で高速位置決めを実現し、卓越した性能を発揮します。
モーションコントローラーは、多軸システムとどのように統合されるのでしょうか?
このシステムは、サーボモーター、ステッピングモーター、リニアモーター、アクチュエーターの3種類のモーターを制御するためにモーションコントローラーを使用し、プログラマブル制御機能によって高い再現性を実現する複雑な多軸軌道を実行します。現在のコントローラーはEtherCATをサポートしており、高速フィードバックを提供し、ロボット操作、溶接ポジショナー作業、計測ルーチンに必要な高度なモーションプロファイルを実行できます。モーションコントローラーのチューニングの成功は、すべての軸でトルクと減衰、剛性設定の適切なバランスを達成することにかかっており、これにより回転ステージとリニアステージが振動することなく動作します。このシステムは、生産システムへの統合をサポートする自動化インターフェースを提供するコントローラーを提供するとともに、診断機能とモジュール式アップデートを使用して生産の中断を最小限に抑えます。コントローラーの選択プロセスは、生産効率の向上を促進し、将来のニーズに対応できる拡張可能なシステムの構築を可能にするため、ROIを決定する上で重要な役割を果たします。
精密作業において、圧電アクチュエータは従来のサーボモーターと比べてどのような違いがあるのでしょうか?
圧電アクチュエータは、極めて高い分解能、低遅延、最小限のバックラッシュにより、従来のサーボシステムやブラシレスモータシステムを凌駕するため、マイクロポジショニングや高周波アプリケーションで最高の性能を発揮します。このシステムは、サブミクロンまたはナノメートルの再現性が求められる光学アライメント、フォトニクス、精密計測アプリケーションで使用されます。サーボモータとリニアモータは、優れた移動範囲とペイロード容量を備えているため、効果的なトルクと慣性制御を必要とする溶接ポジショナ、重量治具、生産ラインに最適です。一部のシステムでは、圧電ステージと粗動サーボステージを組み合わせることで、大きな移動と超微調整の両方を実現し、システム全体の投資対効果(ROI)を向上させています。エンジニアは、コントローラの互換性、システムの剛性、特別なインターフェース要件、モーションコントローラのニーズを評価し、圧電システムの潜在能力を最大限に引き出す必要があります。
多軸測位システムを導入する前に、投資対効果のどのような側面を評価すべきでしょうか?
多軸システムのROIを計算するプロセスでは、組織は生産効率の改善とダウンタイムの削減、および精密なパフォーマンスを達成する能力を評価する必要があります。 溶接位置決め 計測および航空宇宙組立作業。ヘキサポッドやモジュール式リニアステージを含む多軸システムの設計により、複数の単軸システムを1つのコンパクトなシステムに組み合わせることができるため、組織はサイクルタイムを短縮できます。分析には、モーター、モーションコントローラ、ベアリングなどの初期費用と、自動化ラインとのシステム統合、および人件費の削減と運用効率の向上によるその後の財務上のメリットの両方を評価する必要があります。モジュール式インターフェースとプログラマブルコントローラにより拡張性と適応性の両方が実現されるため、投資は将来のプロセス変更に対しても安全です。総所有コストには、メンテナンス費用と治具の互換性、および精密な位置合わせとばらつきの低減によってもたらされる潜在的な品質向上を考慮する必要があります。
参照ソース
位置決め精度向上のための多軸工作機械のモデリングと測定
oulurepo.oulu.fi
多軸工作機械における位置決め精度を向上させる方法を探求する。
工作機械における多軸運動学的位置決めのためのアプローチの比較
journals.sagepub.com
多軸工作機械における様々な運動学的位置決め方法を分析する。
動的ターゲットのビジョンベース追跡と多軸位置制御への応用
link.springer.com
動的な多軸位置制御のための、視覚ベースの技術を検証する。





{kind=link}
{kind=link}
{kind=link}
{kind=link}